計画研究
- X00 総括班
- A01 調和的予測班
- A02 能動的観測班
- A03 影響モデル班
- A04 現象モデル班
A02 能動的観測班
- 研究課題名
- A02:ドローンを用いた微気象の能動的超高密度観測技術の創出
- 研究代表者
-
鈴木 智
千葉大学 大学院工学研究院・准教授
http://www.em.eng.chiba-u.jp/~acslab/link.html
概要
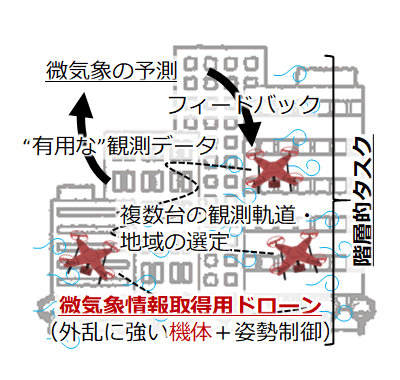
本研究班では、微気象(人工物や人間活動の影響を強く受ける地表付近の詳細気象)予測に有用な、建物密集区域の低高度(高度数10m)における気象情報(気温、気圧、湿度、風向、風速)を収集し、微気象を観測する技術を創出する。MEMS技術によって開発された超小型センサを、新たに開発する生物規範型ナノドローンに統合し、微気象観測のための階層的なタスク(機体の制御、複数機体や障害物の回避、有用な情報を得るための軌道・地域の選定)を、各階層での最適性を保ちながら制御することで、機動性だけでなく適応性も持ち合わせた能動的観測の実現を目指す。タスクの階層性と市販のマイクロドローンも有効に利用しながら要素技術の開発を進め、微気象予測班と連携しながら、微気象予測システムの創出を目指す。
本研究の学術的背景
本研究領域の目的である微気象の予測に向けて、密集ビル街区内の微気象の観測は不可欠であるが、現状、微気象を空間的に観測した例はない。安価なセンサを大量に用いたとしても、街区の3次元空間を網羅することは難しい。従来の空間計測として、レーダを用いた観測が挙げられるが、高空間分解能を謳うドップラーライダーであってもその分解能は100m程度であり、また、レーザ光が建物に遮られてしまうため、十分に解像することができない。
このような、レーダや地上での測定ではカバーできない中間的な領域では、近年発展の目覚ましいドローンが非常に有用である [野波, ドローン産業応用のすべて 2018] 。現在、特に大型の産業用のドローンなどは、災害時の情報収集や、インフラの点検、農薬の散布などで、既に実用化されており、ドローン技術の応用により、より高密度で有用性の高い気象情報の取得が可能となると考えられる。代表者の鈴木は、このような情報収集のためのドローンの自律飛行を目指す研究に従事してきた [鈴木, 野波, 計測と制御 2017など] 。
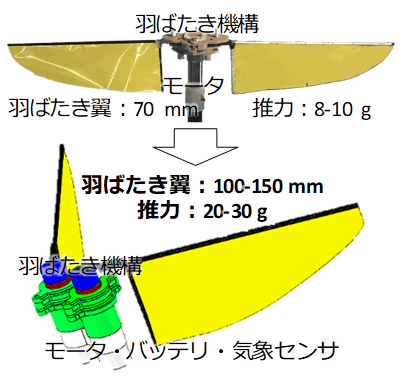
ビル街区での観測にはこのような大型のドローンは、安全性・機動性などの観点から適さず、より小型でかつ安定性・機動性の高い、人と万が一衝突しても負傷の危険性を極力減らすことのできるドローンが必要である [Floreano & Wood, Nature 2015] 。分担者の劉・野田は、大型の昆虫などの羽ばたき飛行を規範とした、生物規範型ドローンの開発を目指した、生物飛行の研究に従事してきた [Nakata, Liu et al. Bioinsp. & Biomim. 2011; Noda, Liu et al. J. Robot. Mechatro. 2018] 。このような小型のドローンを複数用いることで、より高密度な気象情報の取得が可能となると考えられる。しかし、生物規範型ナノドローンは、その制御の困難さから、自律飛行の実現に至っていない。また、小型のドローンの場合、ペイロードが小さく、市販のセンサを搭載することが難しい。これに対して、分担者の高橋は、MEMSを用いた超小型の風速・圧力センサの開発に従事してきた [Takahashi et al. J. Micromech. Microeng, 2012] 。ドローンの持つ機動性は大きな強みであるが、それだけでは微気象予測の実現に必要な要件を満たさないと考える。ドローンを取り囲む微気象状態だけでなく、社会サービスが要求する時空間スケールや精度は時々刻々と変化し、それに対応するためには観測システムには適応性も要求される。例えば、複数のドローンを用いて微気象を観測する場合、個々の機体の安定飛行、障害物や機体同士の衝突回避、より価値のあるデータを取得するための各機体の絶対・相対位置・軌道・地域の選定など、必要となるタスクに階層性がある。分担者の椿野や協力者の原は、このような階層的な制御目標が与えられたシステムに対して、階層的に分散した最適制御系設計法に関する研究に従事してきた。
微気象予測の実現には機動性と適応性を兼ね備えた能動的観測が必要であり、本研究ではその微気象の観測に特有の制約を、ドローン 技術(図2)と多階層制御技術を融合するという学際的なアプローチで解決する。