Planned Research
- Administrative Group
- Harmonic Prediction
- Active Monitoring
- Impact Modeling
- Phenomenon Modeling
A02 Active Monitoring Group
- Research Task
- A02: Creation of Active hyper-density Monitoring Technology for Micro-meteorology Using Drones
- Principal Investigator
-
Satoshi Suzuki
Associate Professor, Graduate School of Engineering, Chiba University
http://www.em.eng.chiba-u.jp/~acslab/link.html (in Japanese)
Outline
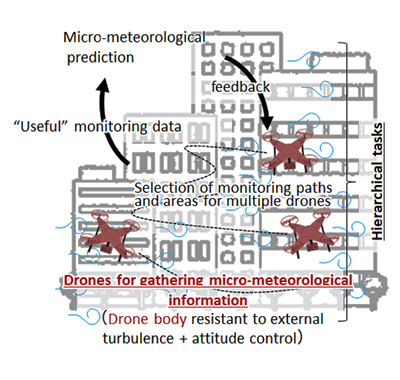
Our research group creates the technology for micro-meteorological monitoring. For this purpose, the group gathers weather information useful for micro-meteorological prediction including temperature, atmospheric pressure, humidity, wind direction, and wind velocity at a low altitude of several tens of meters in building blocks in urban areas. Micro-meteorology here means the micro-scale meteorology just above the earth surface where the atmospheric conditions are strongly affected by artifacts and human activities. The group integrates the microsensor developed by MEMS technology into the newly developed biomimetic nano drones. This enables control of the hierarchical tasks for micro-meteorological monitoring while maintaining optimality at each level. The hierarchical tasks include controlling the device, avoiding collision of multiple drones, clearing obstacles, and selecting paths and areas for obtaining useful information. In this way, the group aims to realize active monitoring with mobility and adaptability. Making effective use of the hierarchy of tasks and commercial microdrones, the group carries on development of element technologies with the aim to create a micro-meteorological prediction system, in tandem with the Micro-meteorology Prediction Group.
Academic Background of This Research
Micro weather monitoring in building blocks is essential for micro-meteorological prediction, which is the objective of this research area. However, no spatial observation of micro weather has been done. Even the use of a large number of inexpensive sensors cannot cover the three-dimensional space in the city blocks. Radars have been used for observation in conventional spatial measurement, but even the Doppler lidar with high spatial resolution cannot resolve sufficiently with its resolution of approximately 100 m and its laser light blocked by buildings.
Meanwhile, drones, which have shown outstanding progress in recent years, are extremely useful for such an intermediate area that measurement by radar or on the ground cannot cover [Nonami, All About Industrial Applications of Drones 2018]. Currently, large-sized drones for industrial use, especially, are already in practical use, for example, in gathering information at the time of disaster, inspection of infrastructures and spraying agricultural chemicals. Accordingly, application of drone technology is considered to facilitate gathering of highly valuable higher density weather information. The principal investigator Suzuki has been engaged in the research aimed at autonomous flight of such drones for information gathering [representative work: Suzuki, Nonami, Measurement and Control 2017].
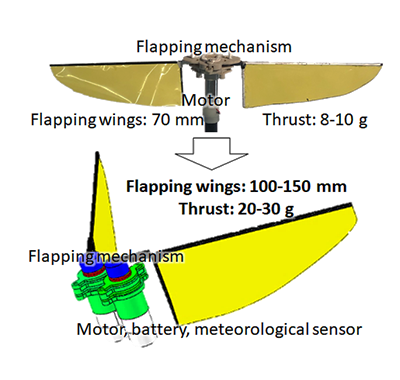
However, large-sized drones are not fit for monitoring in building blocks in view of safety and mobility. We need more compact drones with higher stability and mobility that can minimize the risk of injury in case they hit a pedestrian [Floreano & Wood, Nature 2015]. The co-investigators Liu and Noda have been engaged in the research of biological flight aiming at developing biomimetic drones modeled after the flapping of big insects [Nakata, Liu et al. Bioinsp. & Biomim. 2011; Noda, Liu et al. J. Robot. Mechatro. 2018].
The use of multiple biomimetic nano drones is considered to facilitate the gathering of a higher density of weather information; however, autonomous flight of biomimetic nano drones is difficult to control and has yet to be realized. In addition, the payload of compact drones is too small to equip commercial sensors. To cope with these problems, the co-investigator Takahashi has worked on the development of micro wind velocity and pressure sensors using MEMS technology [Takahashi et al. J. Micromech. Microeng, 2012]. The mobility of drones is a great advantage, but it is not considered to meet the full requirements for realizing micro-meteorological prediction. Not only the micro-meteorological conditions surrounding the drones but also the time-space scale and accuracy required by social services are changing constantly. To cope with these conditions accordingly, adaptability is also required for the monitoring system. For instance, micro-meteorological monitoring using multiple drones requires hierarchical tasks such as ensuring stable flight of individual drones, clearing obstacles, avoiding drone collisions, and selecting absolute and relative positions, paths, and areas for individual drones to obtain more valuable data. The co-investigator Tsubakino and the research collaborator Hara have been engaged in researching the design method for the hierarchically distributed optimal control system that is applicable to such systems that are given hierarchical control targets.
Realization of a micro-meteorological prediction requires active monitoring with mobility and adaptability. This research solves the constraints peculiar to micro-meteorological monitoring through an interdisciplinary approach that integrates drone technology (Fig. 2) and multi-level control technology.